Кибернетика кратко характеризуется как наука об управлении, подробнее — как наука об общих закономерностях процессов управления и передачи информации в машинах и живых организмах.
Техническая кибернетика — научное направление, которое на основе общих для кибернетики в целом идей и методов изучает технические системы управления. Техническая кибернетика — это теория и практика автоматического управления и регулирования, а также научная база для решения комплексных задач автоматизации производства и сложных систем управления (транспорт, ирригационные и газораспределительные системы, атомные электростанции, космические корабли и пр.).
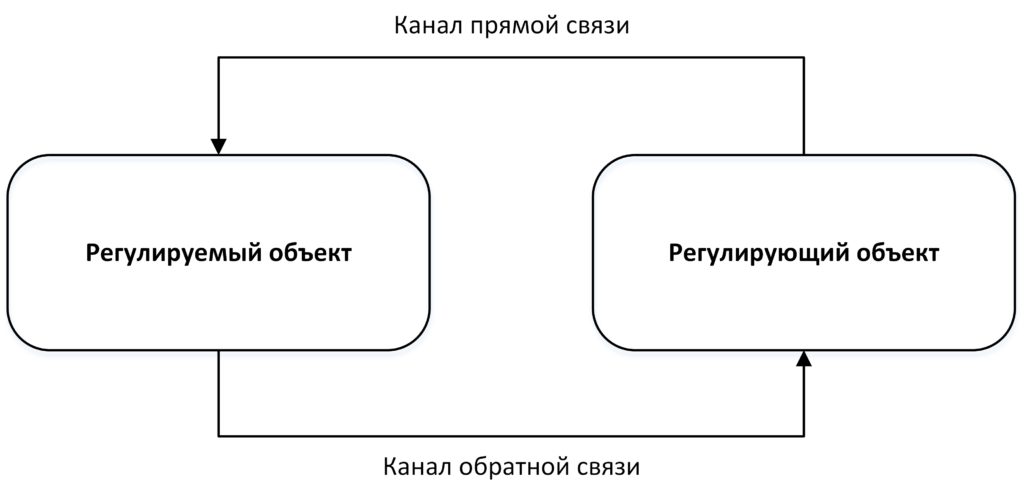
Рисунок 1
Что характеризует любую кибернетическую систему (т. е. систему, в которой осуществляется управление и регулирование): наличие регулируемого (управляемого) объекта, регулирующего (управляющего) органа и каналов прямой и обратной связи (рис. 1). В каждой такой системе происходит обмен информацией между ее частями (по каналам связи); от того, насколько эффективно информация перерабатывается, зависит эффективность действия всей системы.
Если, например, вооружившись карандашом, но не пользуясь линейкой, попытаться нарисовать на листе бумаги длинную прямую линию, а затем провести рядом с ней еще одну, но теперь — с помощью линейки, то, сравнивая обе линии, мы убеждаемся, что первая линия получилась не совсем прямой. Как бы мы ни старались, рука еле заметно отклоняется то в одну, то в другую сторону, и карандаш, не имея надежной опоры, оставляет на бумаге слегка извилистый след.
Откуда эти колебания, как их объяснить?
Движениями руки руководит «управляющий центр» человеческого организма — головной мозг. От него по нервам один за другим к руке бегут сигналы-команды о том, какие группы мышц надо включить в работу в каждый момент времени, чтобы придать руке и карандашу в ней необходимое положение. А от мышц руки и от органов зрения по другим нервам таким же потоком идут к мозгу сообщения о результатах исполнения сигналов-команд.
Но, сравнивая достигнутое с желаемым, «управляющий центр» немного запаздывает с выдачей очередных сигналов-команд, а исполнительный орган — рука, получая эти сигналы, гоже не успевает мгновенно реагировать на них. Этим и объясняются небольшие колебания руки с карандашом при выполнении нашего несложного опыта.
Сказанное лишь простой пример управления в очень сложной системе, которую представляет собой человеческий организм. Здесь ни на секунду не прекращается обмен сигналами между отдельными органами, с одной стороны, и центральной нервной системой — с другой. Благодаря этому обмену осуществляется координация движений, устанавливается кровяное давление, поддерживается температура тела и т. д — короче говоря, человек живет, мыслит, ориентируется в пространстве, выполняет разнообразную работу.
Человеческий организм не просто сложная система — это система самоуправляемая. Ее структура соответствует схеме, представленной на рисунке 1 . И именно в непрерывном и достаточно интенсивном обмене информацией между основными частями системы по каналам прямой и обратной связи — залог успеха в управлении.
В организмах животных управление происходит по такой же схеме. И тут нет ничего удивительного: ведь по своей природе животные достаточно близки человеку.
Можно указать все характерные черты этой схемы и для любого вида растений. Правда, здесь немного труднее разобраться в каналах связи. Но если присмотреться внимательнее, их непременно можно найти. Ведь только проявлением этих связей можно объяснить, например, движение ярко-желтых головок подсолнечника вслед за солнцем.
Обратимся теперь к технике. Здесь replica rolex yacht master m226659 0002 mens rolex calibre 2836 2813 black in store автоматические устройства управления заменяют внимание, память человека и как бы подражают деятельности нашей нервной системы. Классический пример технической самоуправляемой системы — паровая машина с центробежным регулятором скорости, предложенная Д. Уаттом почти 200 лет тому назад. Регулятор содержит массивные шары, соединенные с помощью рычагов с валом машины. При увеличении скорости вращения вала центробежная сила разводит шары, и они тянут за собой рычаги, опускающие задвижку на трубе, по которой подводится пар. В машину начинает поступать меньше пара, и скорость вращения вала снижается.
Здесь паровая машина — управляемый объект, а центробежный регулятор — управляющий (регулирующий) орган. Через рычаги и задвижку (это прямая связь) регулятор посылает управляемому объекту сигналы управления; через ось регулятора, соединенную с валом машины, осуществляется обратная связь — регулятор получает сигналы о результате управляющего воздействия.
Такая схема самоуправляемой системы характерна и для многих других технических устройств и машин-автоматов.
Вот, например, авторулевой на океанском лайнере. Едва объект управления — судно — отклонится от заданного курса, гирокомпас, который следит за правильностью курса, передает команду соответствующим механизмам, и они воздействуют на руль, выдерживая заданный курс.
Родной брат авторулевого — автопилот, сохраняющий курс летящего самолета. Этот автомат получает информацию о положении воздушного корабля от гироскопа, установленного на самолете. На основе получаемой информации автопилот управляет рулями крылатого лайнера, не позволяя ему сбиться с пути.
В этих примерах также нетрудно найти все элементы изображенной на рисунке 1 схемы кибернетической системы.
Итак, технические устройства и машины, животные и растения, человеческий организм… Наш список самоуправляемых (кибернетических) систем еще не исчерпан. В него нужно внести также человеческое общество, большие и малые коллективы людей. Ведь любой завод или школа, научно-исследовательский институт или воинская часть, маленькое село или большой город и даже вся наша огромная страна — все это тоже очень сложные самоуправляемые системы. И в каждой из них — все та же схема управления: управляемый объект, управляющий орган и соединяющие их каналы прямой и обратной связи образуют своего рода замкнутый круг — «кольцо связи».
Большое сходство процессов управления в различных по своей природе и структуре сложных системах не осталось без внимания ученых. Было установлено, что все процессы управления, где бы ни протекали они и как бы разнообразны ни были, подчиняются одним и тем же общим и объективным законам. Изучение этих общих законов и составляет предмет специальной науки об управлении — кибернетики.
Термин «кибернетика» происходит от древнегреческого слова κυβερνητική (кибернетес) — рулевой, кормчий, управляющий. Кстати, таково же происхождение слов «губернатор» и «гувернер». Когда-то, более 2000 лет тому назад, древнегреческий философ Платон называл «кибернетикой» искусство управления кораблем, а в позапрошлом столетии французский физик Андре Ампер использовал это слово для обозначения не существовавшей еще в те годы науки об управлении государством. После Ампера долгое время термином «кибернетика» ученые не пользовались, это слово было забыто.
Снова ввел его в употребление около 80 лет тому назад американский математик Норберт Винер, который одним из первых сформулировал основные идеи новой науки. Книга этого ученого «Кибернетика или управление и связь в животном и машине», опубликованная в 1948 г., уже в самом названии содержала определение новой отрасли знаний. Идеи, высказанные в этой и других работах Н. Винера, быстро получили развитие в трудах многих ученых — математиков, физиков, физиологов, философов. Новая наука с древним названием стала быстро и успешно развиваться.
Таким образом, объектом изучения кибернетики являются сложные динамические системы: живые организмы (животные и растения), технические агрегаты (транспортные средства, машины и пр.), социально-экономические комплексы (организованные группы людей, бригады, предприятия, отрасли промышленности, государства).
Предметом изучения кибернетики являются процессы управления в сложных динамических системах.
Основной целью кибернетики является изучение и оптимизация систем управления.
В кибернетике принято выделять ее теоретическую часть — теоретическую кибернетику, ее основное содержание — совокупность теоретических проблем, относящихся к системам и процессам управления в них. Сюда относятся, в частности, следующие основные разделы: теория информации, теория алгоритмов, теория автоматов, теория игр. В зависимости от типов систем управления, которые изучаются прикладной кибернетикой, последнюю подразделяют на биологическую, техническую и экономическую кибернетику.
Таким образом, кибернетика тесно связана с другими науками: физико-математическими, техническими, биологическими, социально-экономическими, гуманитарными. Но связь эта определяется предметом исследования и ограничивается вопросами, относящимися к процессам управления.